New controller means fancier footwork for Salto-IP
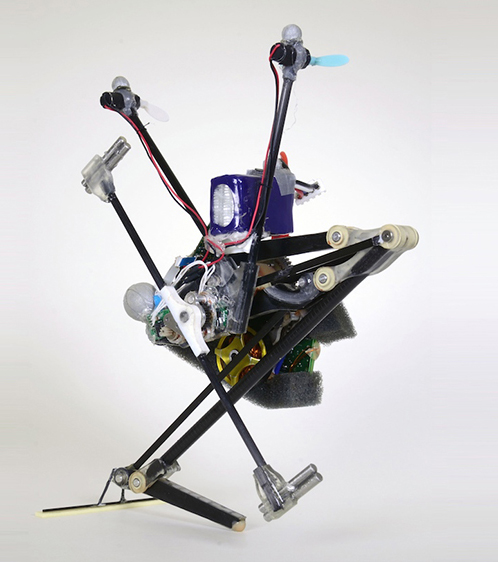
Salto-IP, UC Berkeley’s one-legged jumping robot, has been outfitted with an upgraded controller which improves precision on landing. The robot is featured in a TechXplore article titled “UC Berkeley team gives jumping robot higher goals than bouncy-bouncy.” It describes a paper presented earlier this month at IROS 2018 in Madrid by Prof. Ronald Fearing and graduate researcher Justin Yim titled “Precision Jumping Limits from Flight-phase Control in Salto-1P.” The researchers have come up with a new control algorithm “that can land Salto-1P’s foot at particular spots on the ground like jumping on stepping stones or playing one-leg hopscotch.”